Project
- 3D Scene Reconstruction and Rendering 课程网址
- 成员:张志强 李磊 刘路阔 柳杨光
第一周 建立网址
第二周 熟悉Android Studio的各种基本操作,阅读论文
阅读论文
*张志强:Image-based 3D scene reconstruction and exploration in augmented reality
*李磊:Scene Reconstruction and Visualization from Internet Photo Collections,PhD Thesis, 2008.
*刘路阔:Joint 3D Scene Reconstruction and Class Segmentation
*柳杨光:Multi-camera scene reconstruction via graph cuts, In ECCV 2002.
编程练习
在对Android Studio有了初步了解以后,动手设计了一个登陆界面。
关于新建项目的步骤这里就不一一展开了,最终在project下创建了login项目
展开res/layout,点击打开activity_main.xml文件,在这个文件里我们将完成登录界面的编写
得到初始界面以后,将activity_main.xml的代码替换成如下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53<TableLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="fill_parent"
android:layout_height="fill_parent"
android:gravity="center_vertical"
android:stretchColumns="0,3">
<TableRow>
<TextView />
<TextView
android:text="账 号:"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:textSize="24px"
/>
<EditText
android:id="@+id/account"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:textSize="24px"
android:minWidth="220px"/>
<TextView />
</TableRow>
<TableRow android:layout_marginTop="20px">
<TextView />
<TextView
android:text="密 码:"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
/>
<EditText
android:id="@+id/pwd"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:minWidth="220px"
android:textSize="24px"
android:inputType="textPassword"/>
<TextView />
</TableRow>
<TableRow android:layout_marginTop="20px">
<TextView />
<Button
android:id="@+id/login"
android:text="登录"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
/>
<Button
android:id="@+id/quit"
android:text="退出"
android:layout_width="wrap_content"
android:layout_height="wrap_content"/>
<TextView />
</TableRow>
</TableLayout>
预览效果如图
第三周 数据集测试(LSD-SLAM)
title: 基于Ubuntu14.04+LSD_SLAM的indigo数据集测试
layout: post
date: 2016-06-01 22:10:37
tags:
- LSD_SLAM
- indigo
categories: - LSD_SLAM
comments: true
原文地址:http://blog.csdn.net/gobitan/article/details/51541977#comments
摘要:LSD-SLAM是一个实时的单目SLAM. 它能实时地在电脑上直接(不使用关键点和特征)创建大规模的半稠密地图,甚至可以运行在智能手机上,如Android/iOS.
搭建Ubuntu14.04.4+ROS indigo基础环境
在ubuntu官网下载ubuntu-14.04.4-desktop-i386.iso安装包,大约1G.
备注:因为ROS包含rviz可视化环境,因此需要选择桌面版。
将安装源换成阿里云的,如何换请参考http://mirrors.aliyun.com/help/ubuntu;
备注:强烈建议将安装源换成国内的,否则安装的时候要么速度慢,要么可能连不上。
在Ubuntu14.04.4中安装ROS indigo,参考:http://wiki.ros.org/indigo/Installation/Ubuntu
1 | dennis@ubuntu:~$ sudo apt-get update |
备注:这里采用的完整安装模式.1
2dennis@ubuntu:~$ sudo rosdep init
dennis@ubuntu:~$ rosdep update
1 | dennis@ubuntu:~$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc |
校验安装是否成功,输入roscore命令,如下:
1 | dennis@ubuntu:~$ roscore |
安装ROS工具
1 | dennis@ubuntu:~$ sudo apt-get install python-rosinstall |
初始化ros编译环境及编译lsd_slam
1 | dennis@ubuntu:~$ mkdir ~/rosbuild_ws |
采用官方提供的数据集进行测试
备注:数据集下载请参考本文的参考资料[2].
测试方法一(采用官方数据集LSD_foodcourt的images)
1 | winter@winter-PC:~$ roscore //执行后新建终端 |


测试方法二(采用官方数据集LSD_room.bag文件)
1 | winter@winter-PC:~$ roscore |


参考资料
[1] https://github.com/tum-vision/lsd_slam LSD_SLAM官网
[2] http://vision.in.tum.de/research/vslam/lsdslam 德国慕尼黑工业大学(TUM)计算机视觉组
[3] http://wiki.ros.org/indigo/Installation/Ubuntu 在Ubuntu14.04.4上安装ROS Indigo
[4] http://releases.ubuntu.com/14.04/ 官网下载ubuntu-14.04.4-desktop-i386.iso
[5] http://wiki.ros.org/ROS/Tutorials 用于ROS安装成功之后的测试
[6] http://www.dev47apps.com/droidcam/linuxx/ 将手机摄像头的视频传输到电脑上的工具
第四周
对已有的源码的进行修改,实现LSD-SLAM在Android平台上的运行。
第五周
录制视频并对录制的视频进行tracking和mapping,实现SLAM,查看LSD-SLAM算法在Android
平台上的效果,最后制作PPT。
工程所需依赖、平台等信息如下:
Description:
Our task is to implement 3D reconstruction from multiple images.
Platform:
Ran LSD SLAM on PC or Android.
Building
PC:
Refer to the site: http://aitechnology.github.io/Project/
Android:
Request
- Android Studio 1.5.1
- OpenCV 2.4.11
- Android 6.0 Marshmallow
Need to modify the path of OpenCV.mk in \$(LSD_SLAM_android)/app/main/jni/Android.mk line 109 and line 111 to the path
of OpenCV.mk your OpenCV4Android is installed.
e.g.
modify1
2line 109: include E:\Libraries\OpenCV-2.4.11-android-sdk\sdk\native\jni\OpenCV.mk
line 111: LOCAL_C_INCLUDE:= E:\Libraries\OpenCV-2.4.11-android-sdk\sdk\native\jni\include
to the path of OpenCV.mk your OpenCV4Android is installed.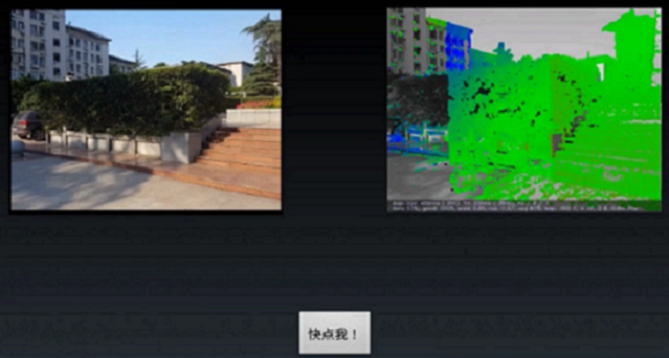
成果展示
LSDPC01_3倍速
从视频中可以看出,帧率基本在25-30之间,包含的深度信息较多时,处理的就会相对慢一点。
LSDPC02_3倍速
相比上面的数据集,对此数据集进行处理时的深度信息更多,因此帧率比上面要低一些。
LSDANDROID_FINAL_4.5倍速率